
The Hinged Doors
|
One day, idling in the workshop, I found myself pondering the lack of hinged doors into the adjacent room off the main warehouse (actual prupose TBA) and was soon investigating mechanisms. I started with a servo, as it contained a geared motor and a method of controlling the limits. (I'd successfully experimented with homemade electronic controllers for the turnout mechanisms on Worton Court). However, the speed of the servos seemed a bit aggressive. The next idea was a pulley system, using one of the motors that had been used for the roller shutter. The speed was perfect, but the need for travel controllers, albeit not too onerous, didn't appeal, at the time.
|
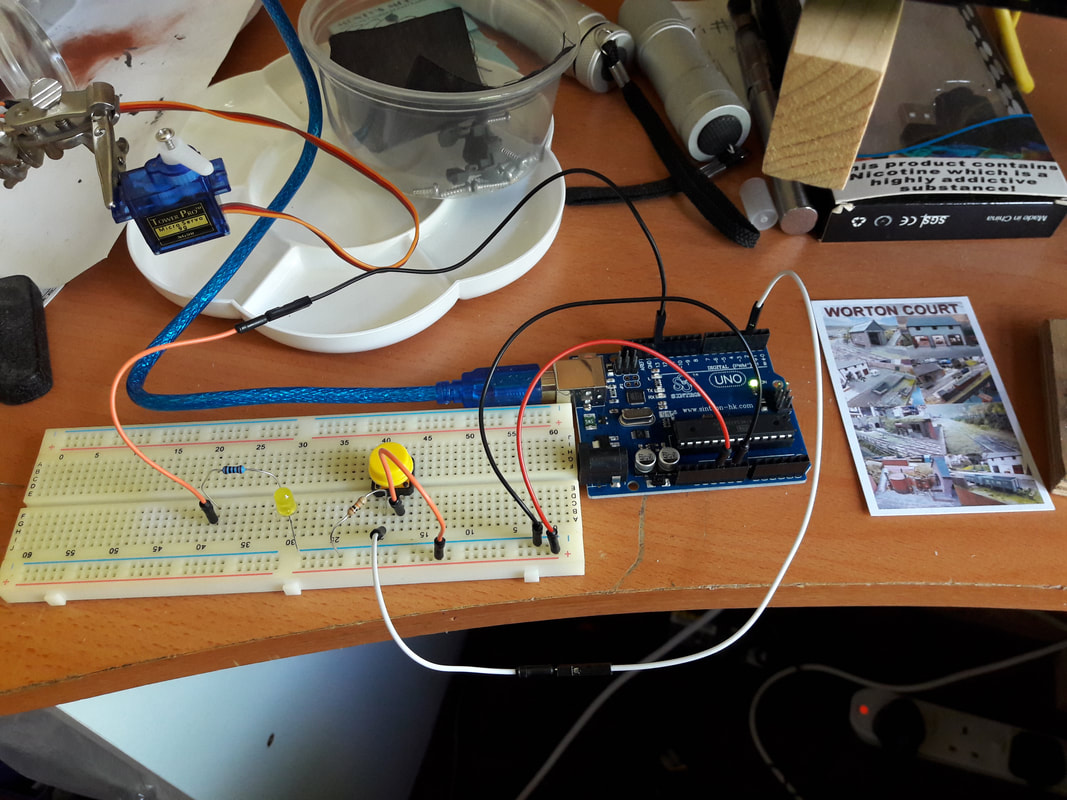
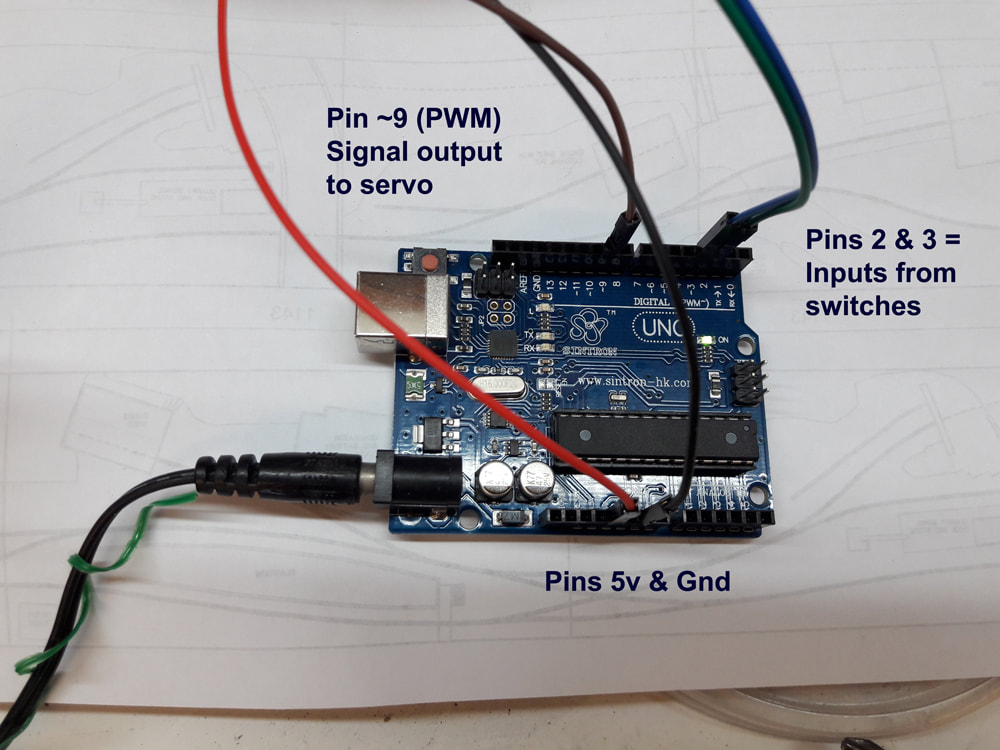
Reverting to a servo solution, a friend pointed me at MERG and their use of microcomputers to slow servos down. I was even lent a magazine with an article on creating realistic 'semaphore bounce' which was ideal to investigate two-speed door operation in one cycle. Having successfully experimented with an Arduino Nano for various simple LED and turntable projects, the idea appealed to me. I soon found YouTube videos on servo controls which highlighted the need for PWM outputs, only available on the the full Arduino module, which I hadn't used before. It looked very promising, so the project was 'off the ground'.
|











|
The Arduino programming and the door mechanism itself progressed simultaneously. Several YouTube videos gave instructions on the code and wiring which helped develop a working solution for controlling the doors with two switches. 'Button 6' was designated to control the hinged doors during the installation of the IR control unit. Successive presses latched and unlatched a 5v relay to provide forward/reverse supplies to motors. The servo code only requires a momentary signal to initiate a full cycle of door operation in each direction, so the relay wiring was adapted to have two circuits flip-flop that equated to two push-buttons.
|
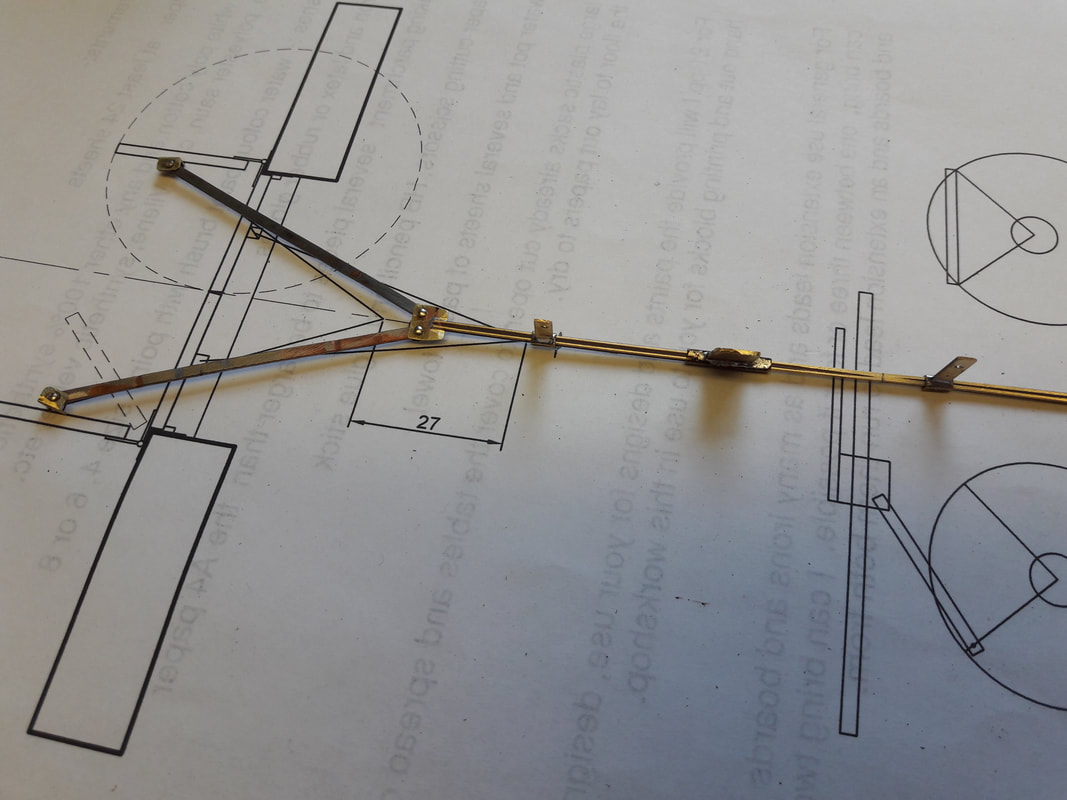
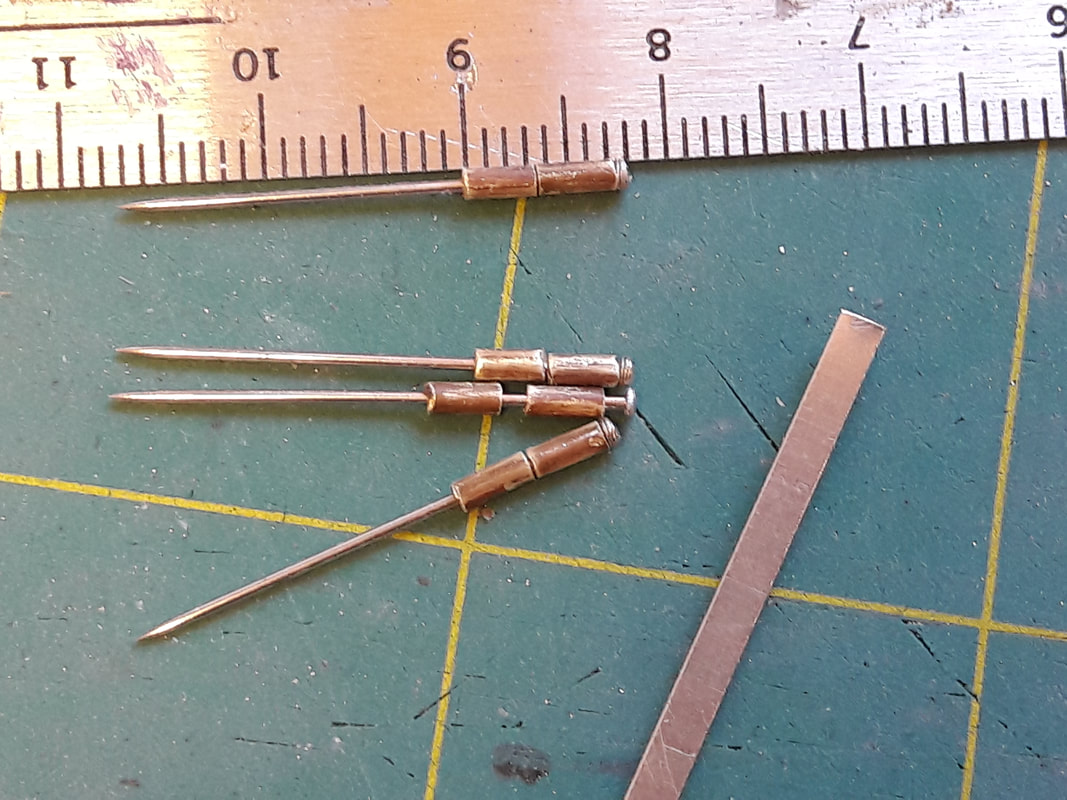
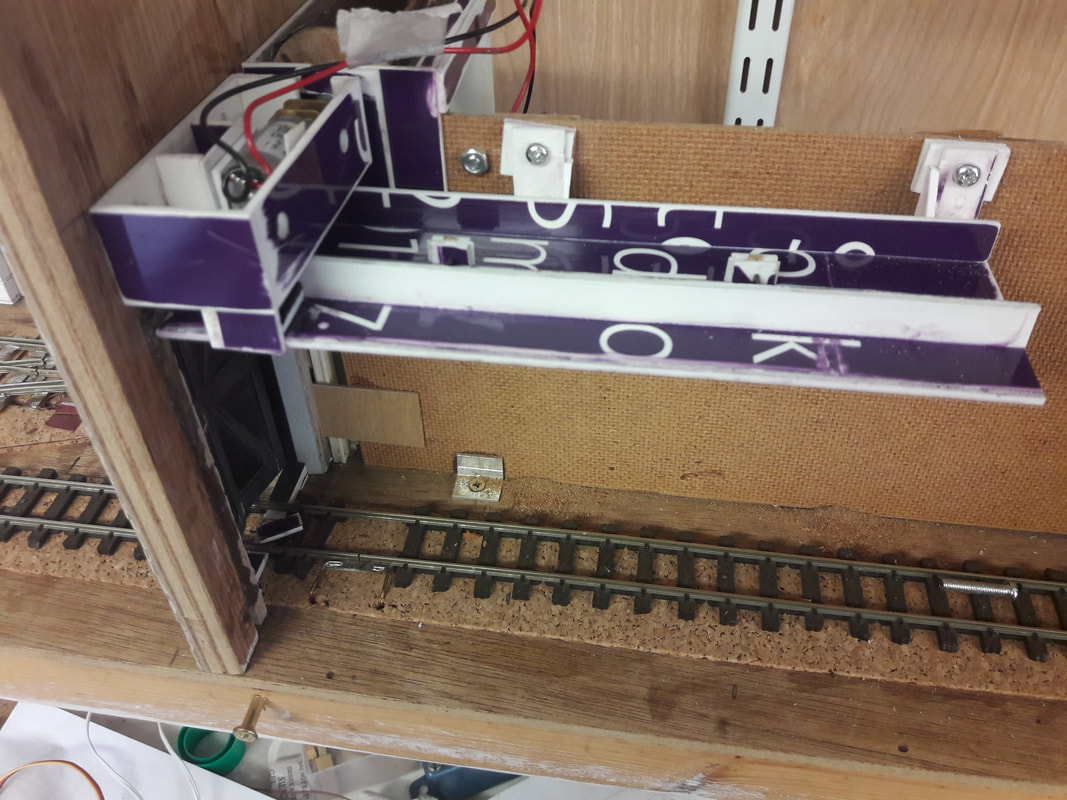
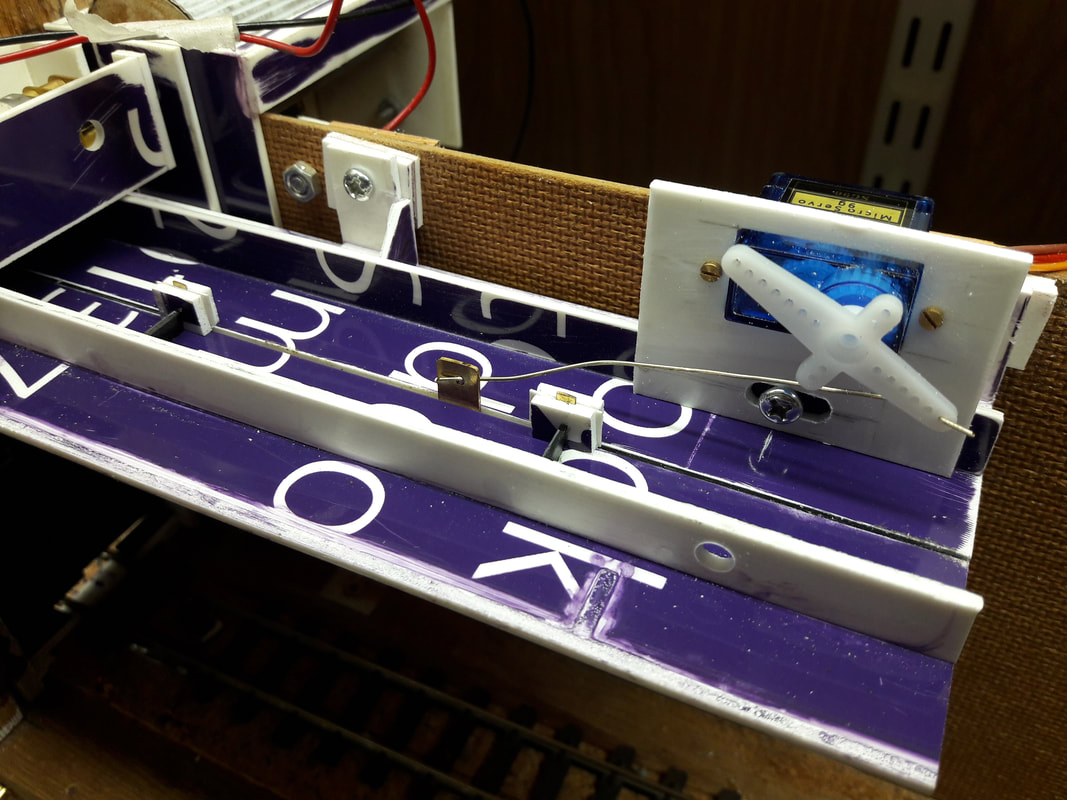
Once the controls were established, the ceiling 'tray' was developed. It has a narrow slot down the centre to facilitate the two small fixed hangers and a larger slider in the middle to transfer the rotary servo movement to the push rod. It was initially thought that the code should include 'slow' portions at the ends, and these were included, but once the whole mechanism was in place and testing commenced, it wasn't needed. By mounting the servo arm with equal travel both sides, meant that a natural change in speed occurred at each end because the servo arm transcribes an arc that reduces the horizontal movement to approx. 25% of the speed in the middle. After several trials, the overall speed of the doors was increased.
|
|
The doors now need a coat of paint. The tray soffit needs to be incorporated into a full ceiling for the room. Maybe a box to represent the real-life actuator will be added. The room needs finishes and a decision on its use needs to be made! |
